Simultaneous Localisation and Mapping for Landing Site evaluation for drones
Published:
This project was done as a part of coursework for 16-833 (Robot Localisation and Mapping) at Carnegie Mellon University
A drone trying to land autonomously needs the ability to evaluate various parts of the ground underneath for their suitability as a landing site. In this work, we developed one pipeline that can perform this evaluation real-time by fusing together a semi-direct visual odometry along with a non-linear ICP. We eventually generate the map as a point cloud, which is then fed into another module for evaluation based on the slope and roughness of the generated point cloud.
System Overview
The following diagram gives an overview of the system we developed along with highlighting the core components used:
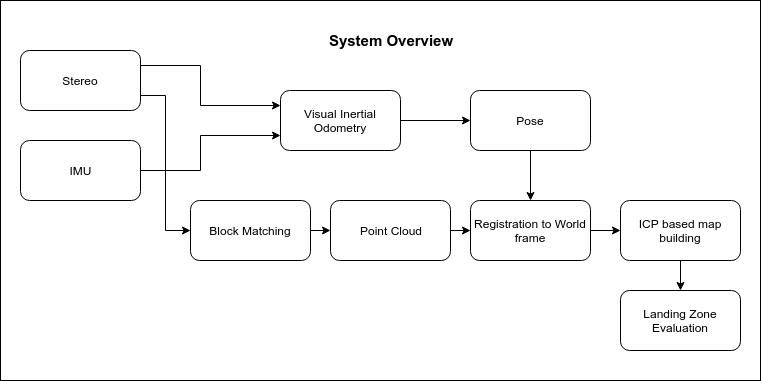
</br> </br>
Here is a link to a presentation for this work:
For more details, check out our write-up for this work here: Link to Write-up